Cite as: Davis, Daniel, Flora Salim, and Burry Jane. 2011. “Designing Responsive Architecture: Mediating Analogue and Digital Modelling in Studio.” In Circuit Bending, Breaking and Mending: Proceedings of the 16th International Conference on Computer Aided Architectural Design Research in Asia, ed. Christiane Herr, Ning Gu, Stanislav Roudavski, and Marc Schnabel, 155–164. Newcastle, Australia: The University of Newcastle.
Abstract
Prototyping digitally responsive architecture requires that architects know how to program and design electronics. Normally they don’t. The challenge for teachers is to teach these skills whilst maintaining a focus on the design potentials of responsive architecture. One method is to teach students to use Input-Output-Process (IPO) diagrams and parametric modelling as pathways into the logic of responsive architecture. The paper discusses the work of students taught this way during a semester long elective. Our analysis shows that IPO diagrams lead to reactive architecture, which matches the current technical limitations of responsive architecture. We argue that mediating analogue and digital models is an essential aspect to successful responsive architecture.
Keywords
Responsive architecture; Physical interaction; Education; Parametric design.
1. Introduction
Parametric models, enabled by a rise in computation, can automatically adjust geometric models in response to real-time data. Unlike solid based digital design methodologies, which use static data to analyse an immobile geometric model, these new parametric tools synthesise dynamic, real-time data to produce a flexible geometric model (Leach, 2009). However, in order to physically construct these flexible and dynamic parametric models, the geometry must be ‘frozen’ causing a disjuncture where the real-time data no longer influences the geometry. Critics tellingly describe the buildings of Frank Gehry, a pioneer of this method, as frozen music (Garcetti, 2004).
In the construction industry, the advent of computation has lead to buildings that use mechatronics to respond in real-time to data. Often this is for environmental purposes - for instance, opening and closing louvers based on internal air temperature and weather reports - but increasingly mechatronics is being used for spatial effects. In designing these responsive systems, parametric modelling provides one way to visualise the response of a building to real-time data.
Both of these skills - parametric modelling and building mechatronics - could be considered niche specialisations, although this is changing with the rise of consumer level design tools to support responsive architecture. In particular the invention of graph-based parametric modelling software, Grasshopper and Generative Components, and the open source mechatronics platform, Arduino, has lowered the required technical skills necessary to create responsive architecture.
The challenge for educators is to introduce students to these fundamental technical skills, while maintaining a focus on the design potential of responsive technology. The aim of this paper is to better understand how educators can teach architecture students to design responsive architecture. The paper provides a qualitative account of a semester long design elective setup to teach students to design responsive architecture using parametric modelling and mechatronic prototypes. We begin with a summary of past work on the practice and teaching of responsive architectural design, which is followed by a description of the teaching process used in this study as well as the results that come from it. We conclude with a discussion of major challenges and opportunities to the implementation of responsive architecture in practice.
2. Prior work
Responsive architecture is defined by Meyboom et al (2010) as an architectural “system that causes change to its environment.” They use the terms responsive and interactive interchangeably, but for this paper the distinction is made between a responsive system, which reacts to an environmental stimulus, and an interactive system, which reacts to an environmental stimulus with prior knowledge of previous interactions. All of the student projects produced as part the RoboStudio reported by Meyboom et al fall into this former category, and, considering the current state of machine intelligence, it would be highly surprising for any student to produce a conversationally interactive system. In this sense the student outcomes in the Meyboom et al paper and the expectations for the students taught in the elective as part of this research, are fairly similar. The key difference is that this paper investigates teaching architecture students to design responsive architecture with parametric modelling and Input-Process-Output diagrams, where as Meyboom et al focused on the physical prototypes from their interdisciplinary class of architecture students and engineering students.
The introduction of parametric modelling to the design process offers interesting possibilities in simulating the aggregate behaviour of responsive elements, but also poses challenges in negotiating the differences between the reality of the digital world and the reality of the physical world (Salim et al, 2010). Our prior work on responsive architecture in the context of a workshop at Smart Geometry 2009 (Salim et al, 2010) and in the context of an elective that ran over summer at the Royal Melbourne Institute of Technology (Salim et al, 2011), has identified this as critical area of practice requiring further research. The elective presented in this paper builds upon previous studios by introducing parametric modelling and the Input-Process-Output (IPO) diagram as a teaching method.
To a lesser extent, the work in this paper also draws upon prior work by, Moore and Hill (2010) as well as Hu and Fox (2003) both of which focus on teaching students to design and build responsive prototypes, however neither includes parametric modelling as part of course syllabus. The teaching of parametric design is similar to the approach used by Burry (2007), although in Burry’s research the students did not physically prototype the designs.
There is a methodological similarity within the prior research discussed in this section. Most of the studies present work from a group of students taught during an experimental studio, and then qualitatively identifying trends in both the students work, and its design history, to reason about the learning outcomes and the challenges facing responsive architecture. This paper takes on a similar methodology by presenting a series of observed patterns in student work arising from a teaching method that uniquely integrates teaching mechatronics with parametric design.
3. Outcomes of teaching responsive architecture
Responsive architecture was taught as a 12 week elective at the School of Architecture in the Royal Melbourne Institute of Technology. The learning objective of the course was to teach students skills in designing responsive architecture, parametric modelling and mechatronics while broadening their general design skills.
The students who elected to take this course had very little, or no experience, in developing electronic systems or building parametric models, although they all had over a years experience using some form of CAD. The students’ technical inexperience was a key consideration in structuring the course. It was undesirable, on such a short course, to spend a large amount of time teaching technical skills prior to the students starting to design, however designing responsive architecture requires some level of knowledge about how to construct responsive models. So the challenge was to enable the students to design responsive architecture while they were learning what it is, and while they were acquiring the skills to prototype their designs. During the first half of the elective, this problem was approached in two ways:
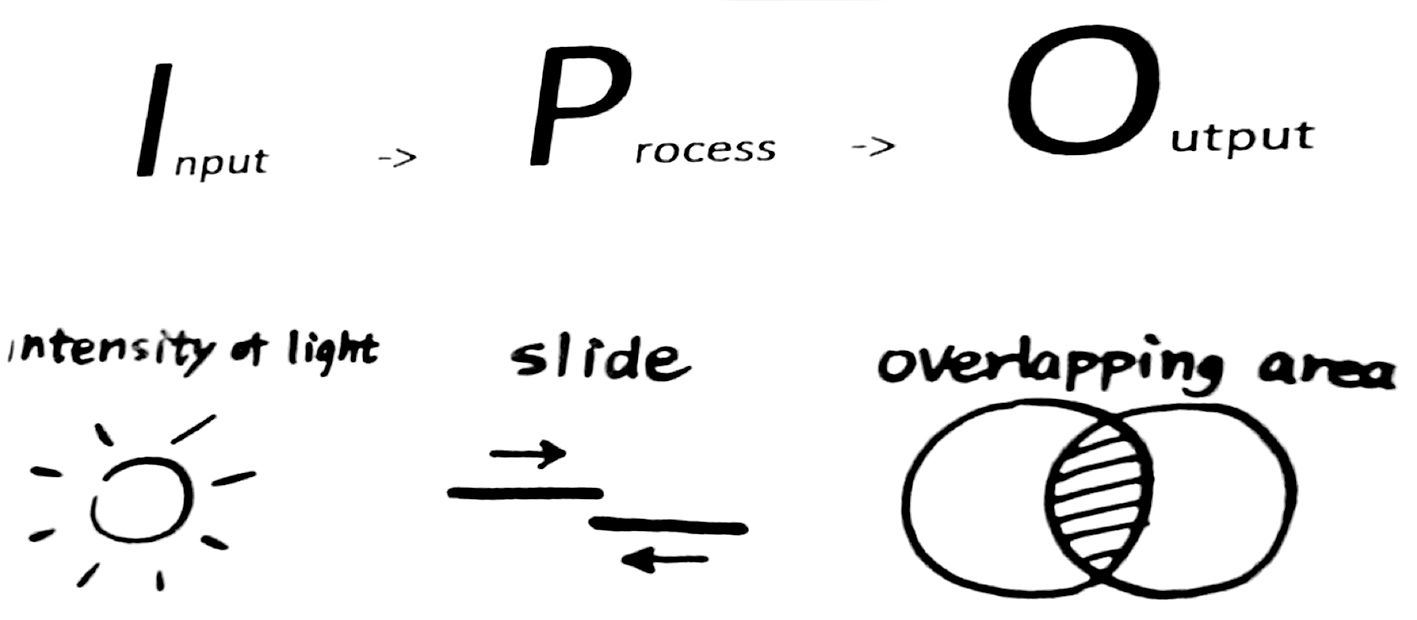
Figure 1. An early IPO diagram of Shuying Zhou's project
1. The IPO diagram: The students were given a conceptual pathway into the design of algorithms using Input-Process-Output (IPO) diagrams. The IPO diagram was developed by IBM in the 1970’s as a communication device to describe the main steps of an algorithm (the formation of inputs, a process to manipulate these inputs and the outputs of that process). For the students, the IPO diagram gave them a formal structure to sketch possible responsive behaviours. It encouraged them to describe these responsive behaviours in algorithmic steps, before they knew how to program an algorithm.
During the first week of the elective, the IPO diagram was introduced to the students as a mapping exercise where they were invited to use maps, diagrams and images to record data sources within the urban environment of Melbourne, Australia. These data sources were to become the inputs for the behaviour of their responsive architecture. During the second week of the elective, the students were shown how to design system behaviour with an IPO diagram. The students selected a data source they had previously mapped, and found a way to describe a process that would manipulate the input to create the desired outputs. By generating different versions of these IPO diagrams, the students could begin to reason about what response was desirable. The design task set was to create a shelter or pavilion in Melbourne, which reacted to one or more of the data sources they had previously mapped. At this stage the students were still learning the basics of parametric modelling and mechatronics, so the IPO diagram became a way for them to sketch (in an algorithmically rational way) the behaviour of a system and to communicate their design’s behaviour during design critiques to fellow students and tutors. An example of a student’s IPO diagram is shown in Figure 1.
2. Workshops: For the first 6 weeks of the elective, the students attended weekly workshops on parametric modelling and mechatronics. The workshops were intended to give the students an idea of the potential of these tools and to give the students the essential skills to generate models with these tools. The students were taught to think about these tools using IPO diagrams. So when using a graph-based parametric modelling tool, they were encouraged to identify the data required for the model (the inputs), to identify what they wanted the model to produce (the outputs) and to construct a process that ties the inputs and the outputs together. This teaching method is different to the teaching method normally employed where the student is taught what each element does within the model, rather than the structure of the model (see any of the Grasshopper training guides for an example of this). The benefit of using the IPO diagram is that the students start to construct their parametric model in a modular way and do not need to be introduced to this concept later on.
In the second half of the elective, the students worked towards designing a responsive pavilion and creating a full scale model of the mechanism from their pavilion. This occurred through a series of weekly design studios where the students would bring both physical and digital models to be discussed and workshopped with the tutors and fellow students. The submission requirements asked the students hand-in both a physical model and a digital model of their design, with the intention the students develop their designs between the two media, but as will be discussed later in this paper, the students tended to lead with one medium and follow with the other.
In the final week of the elective the students installed their working prototypes and digital models, which they presented to a panel of external reviewers. A selection of these projects, and the major moments in their creation, are reviewed in the following subsections.
3.1. Fishantasy
Teng Ge designed this prototype for a responsive ceiling that responds to the movement of the cars on the road it is suspended above. Ge’s inspiration was the design of Aegis Hyposurface by dECOi, and the movement of fish when they flock together. Like a flock of fish, the individual components that make up the surface move away from moving objects.
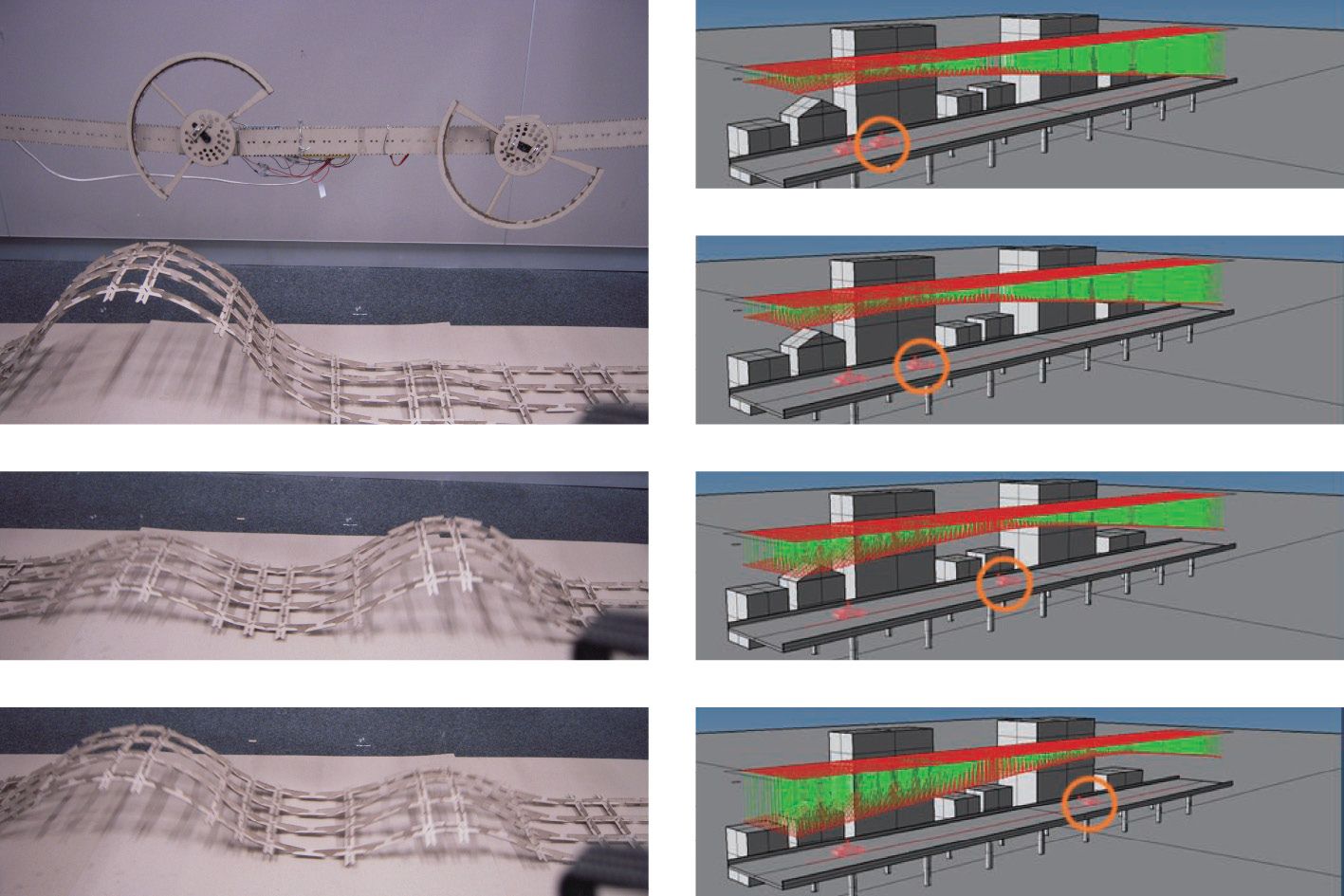
Figure 2. The physical and digital model of Fishantasy
Ge started with a digital sketch, developed in Grasshopper, of an array of components that reacted to an attractor point. In subsequent design revisions Ge refined this to an undulating ceiling that reacts to movement underneath. A major breakthrough on the project was developing a way to create the undulations without every component being individually actuated. Ge achieved this through a series of physical prototypes that explored the connection detail between components to give the right amount of curve in the structure - a subtlety of the material that was impossible to capture in a digital model. In the final prototype, a camera is used to track objects. The coordinates of the objects are sent to Grasshopper where the parametric model reacts to the new set of inputs. The coordinates are also sent to an Arduino board that actuates the physical prototype.
3.2. Responsive Stained Glass Shelter
This project designed by Shuying Zhou is a bus shelter’s roof made from interlocking, multi-coloured, translucent, modular panels. The panels act as gears, rotating in unison to control the amount of shade offered and the pattern of blended colours. Their movement is related to the ambient light intensity, creating more shade (and colours) when it is sunny.
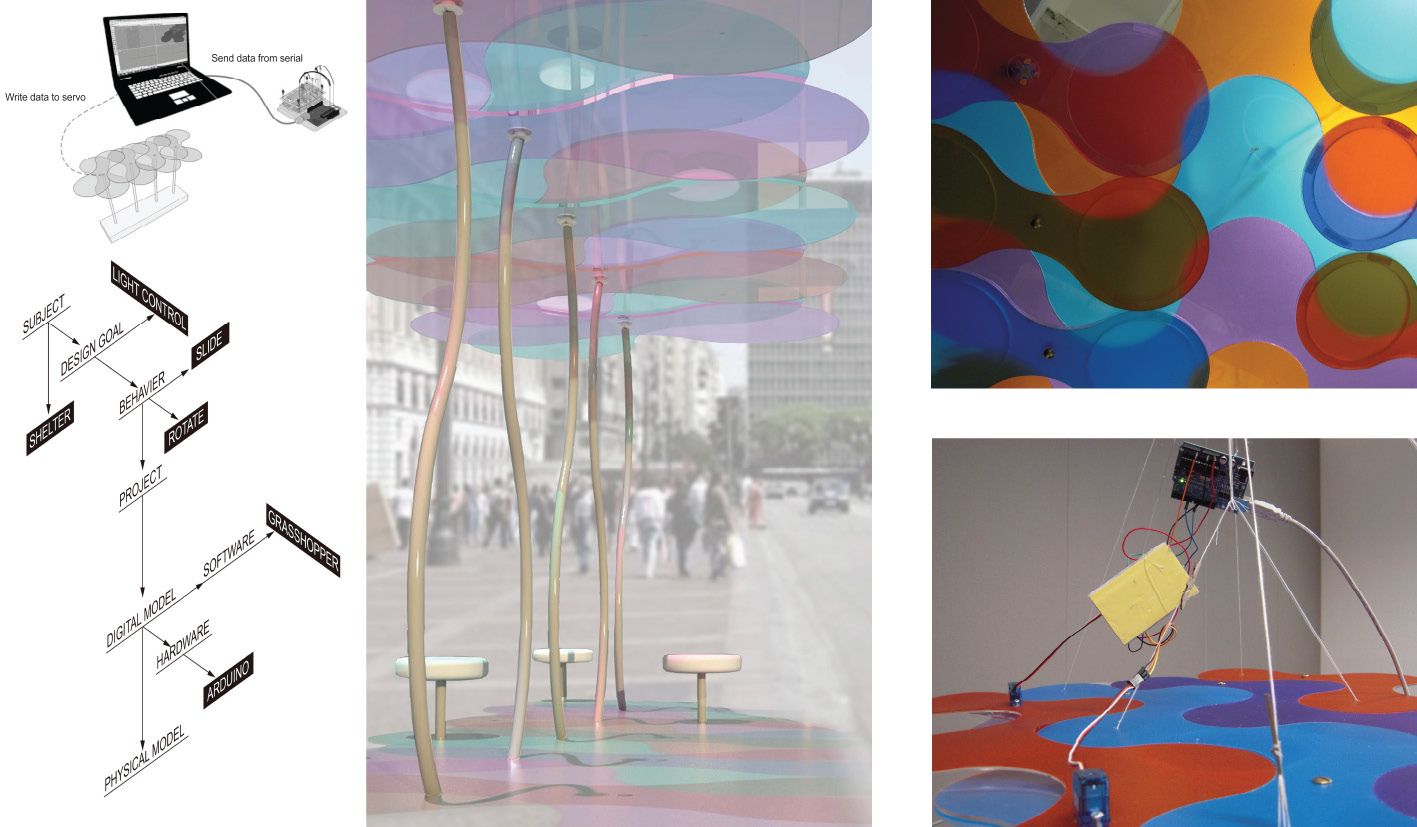
Figure 3. The physical and digital model of Responsive Stained Glass Shelter
Zhou started with physical models exploring a number of possible rotational mechanisms for modular elements around vertical and horizontal axes. She then used Rhino and Grasshopper to simulate and visualise their intended behaviour. The chosen panels were laser cut at full scale and assembled to form one ceiling panel of the shelter prototype. It was only when physically cut that the deformation, friction and tolerances of the modules became apparent, requiring Zhou to refining her design to overcome these construction problems.
3.3. Responsive Walkway and Shelter
Intje Siswandi designed a shelter that folded out of the walkway in response to pedestrians walking around it, allowing space for gathering crowds and providing shelter for small groups of people.
Siswandi’s starting point was a series of Rhino models exploring folded metal plates. The folded plates were readily drawn in Rhino, but it was difficult to predict how these plates would move when actuated. For this reason, Siswandi switched to fabricating a number of physical components to further explore her idea. She continued to develop the parametric model as a replicated rather than an anticipation of the physical models.

Figure 4. The physical model and digital impression of Responsive Walkway And Shelter
3.4. Responsive And Interactive Pixel Facade
Sean Seah designed a pixel facade, where each unit has an aperture that can be opened and closed to display information and control the ambient light level.
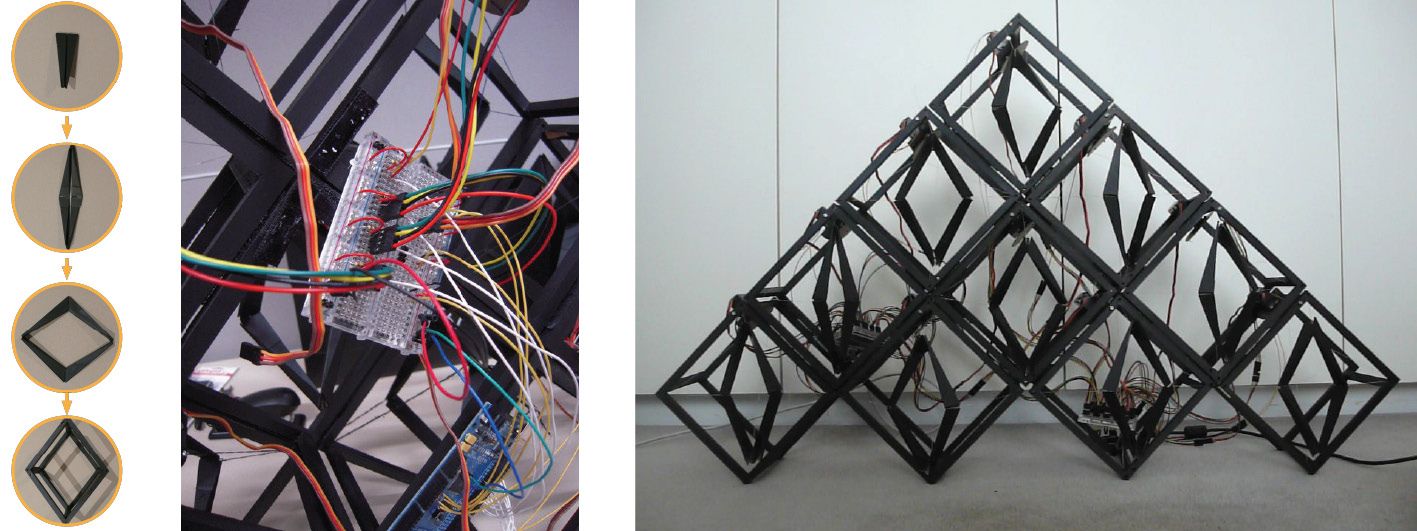
Figure 5. The physical model of an interactive/responsive pixel facade
Seah’s work is inspired by existing urban media facades, which he believes are unresponsive and do not take into account potential contextual human interactions. Fortuitously, he came across an origami inspired method of folding shapes, and developed the geometry to become the iris of his pixels. Like with Siswandi, Seah found it difficult to replicate the folding of the origami unit in a parametric model, although since a pixel was difficult to manufacture, Seah had to use a parametric model to simulate and design the aggregate behaviour of his pixels. In his final presentation Seah created an array of 10 pixels which each individually responded to light, and collectively responded to sound.
4. Challenges facing the teaching of responsive architecture
In reviewing the student work produced from this elective, a few trends emerge regarding the teaching method employed.
Firstly, it is clear that the students, who had never previously programmed or created a parametric model, were successful in designing and modelling responsive architecture with digital tools. This is not unexpected in light of the previous work by Meyboom et al (2010), Moore and Hill (2010) as well as Hu and Fox (2003), but considering the teaching approach was different, it was by no means certain.
Secondly, while the projects utilise a diverse range of inputs and produce a wide range of effects, the interaction on all of these projects is reactive and tightly scripted; if one thing happens, then a prescribed movement happens. For this reason the projects are described as responsive rather than interactive or intelligent. The responsiveness of the projects is partly attributable to the IPO diagram, which encourages reactionary behaviours in response to prescribed inputs. An approach that encourages more machine intelligence would incorporate feedback between previous interactions and states, such as was done by Ruairi Glynn in his Performative Ecologies project. However it is important to consider that digital design tools, namely parametric modelling, are not conducive to these bi-directional and history based relationships. It may be that teaching students to design more interactive architecture requires revising the IPO diagram to incorporate more sophisticated interactions, and creating a new set of tools that can model these types of behaviours.
Thirdly, on almost every project there are defined moments where the project shifted from being developed digitally to being developed physically and vise-versa. These moments were often disruptive, particularly when a student had a physical model that was difficult to capture digitally and, conversely, when a student had a digital model that left out the physical qualities of the materials - in particular material tolerances and bending. These disruptions are not necessarily negative - in many cases they encouraged more refined designs - but they do demonstrate the disjunction between the physical and digital world, and reinforce the importance of teaching students not only how to design responsive architecture digitally, but also how to prototype responsive architecture physically.
5. Conclusions and Future Work
For a student, learning to design responsive architecture involves technical skills like programming and parametric modelling, which they are unlikely to have encountered before. The challenge for teachers is to allow the design process to occur concurrently, rather than separately, to the students required skill acquisition. In this research we have demonstrated that the Input-Process-Output (IPO) diagram is a useful teaching tool to guide students into thinking algorithmically before they are sufficiently skilled to create an algorithm. The draw back to this method is that it predisposes the students to creating reactionary rather than interactive architecture, although the difficulty of creating interactive architecture with the current design tools, in particular parametric models, somewhat nullifies this limitation.
The research has also demonstrated the importance of physical prototyping. At a time when design studios are increasingly held in computer laboratories, and when architecture is designed to be digitally responsive, it is important to set aside time, space and resources, so that students can learn first hand the shortcomings of their digital designs and address the physical limitations of architecture.
Our future research will involve turning the elective into a core design studio, and collaborating with the mechatronics and textile design schools to explore new materials for responsive architecture.
Acknowledgements
Thank you to Teng Ge, Shuying Zhou, Intje Siswandi and Sean Seah, for allowing the publication and discussion of your work.
References
Burry, J.: 2007, Mindful Spaces: computational geometry and the conceptual spaces in which designers operate International Journal of Architectural Computing, 5(4), 611-624.
Garcetti, G.: 2004, Frozen Music, Princeton Architectural Press, Princeton.
Hu, C. and Fox, M.: 2003, Starting from the Micron: A Pedagogical Approach to Designing Responsive Architecture: In Proceedings of the 8th International Conference on Computer-Aided Architectural Design Research in Asia CAADRIA 2003, Bangkok.
Leach, N.: 2009, Digital Morphogenesis, Architectural Design, 79(1), 32-37.
Meyboom, A., Wojtowicz, J. and Johnson, G.: 2010, ROBO studio: towards architectronics: Proceedings of the 15th International Conference on Computer Aided Architectural Design Research in Asia CAADRIA 2010, Association for Research in Computer-Aided Architectural Research in Asia (CAADRIA), Hong Kong.
Moere, A., and Hill, D.: 2010, Research through Design in the Context of Teaching Urban Computing: Proceedings of the 21st Annual Conference of the Australian Computer-Human Interaction Special Interest Group (CHISIG), Melbourne.
Salim, F.; Mulder, H. and Burry, J.: 2011, Form Fostering: A novel design approach for interaction and responsive architecture modeling in the mixed reality, The Journal of Information Technology in Construction,16, 133-148.
Salim, F.; Mulder, H. and Jaworski, P: 2010, Demonstration of an Open Platform for Tangible and Social Interactions with Responsive Models: In Proceedings of the 28th International Conference of the Association for Computer Aided Design in Architecture ACADIA 2010, New York.